Pipeline
The pipeline processes a smartphone video in four steps to produce 3D electrode coordinates in a head-centered coordinate system.
1

Video Recording
Mark landmarks, record ~45 sec with a 1080p smartphone camera.
2

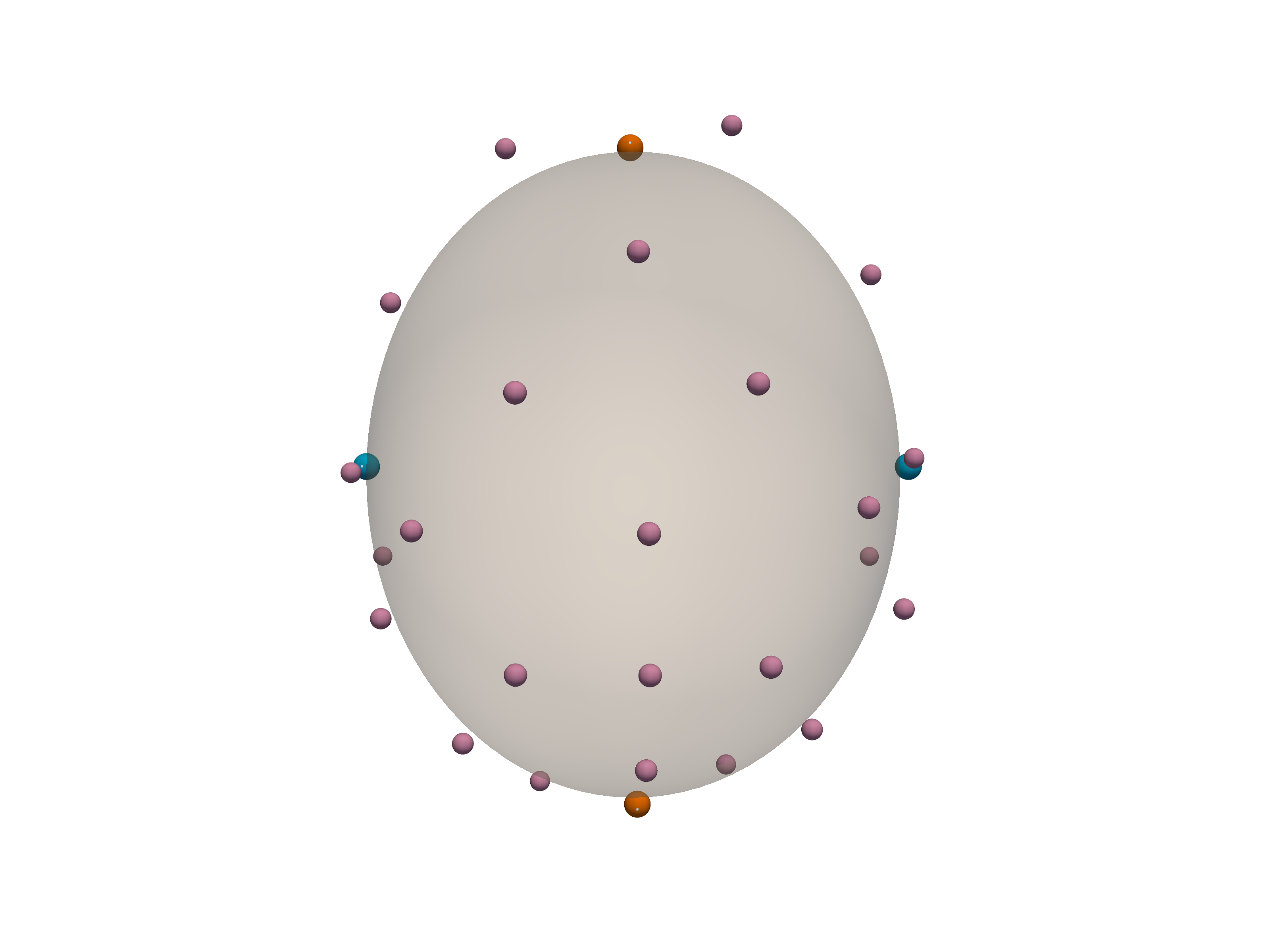
3D Reconstruction
VGGT extracts 3D point cloud, camera poses, and depth maps from 28 frames.
3
Electrode Detection
YOLOv8 auto-detection with 80% confidence filter + manual correction.
4
Head Coordinate Transform
Landmark alignment, real-world scaling, and 3D coordinate extraction.